在上一單元中,伺服馬達的角度是由程式來控制,在此單元,我們就來讓伺服馬達的角度由可變電阻來決定。當我們轉動可變電阻的時候,這個伺服馬達的角度也會跟著一起轉動。先來看電路圖:
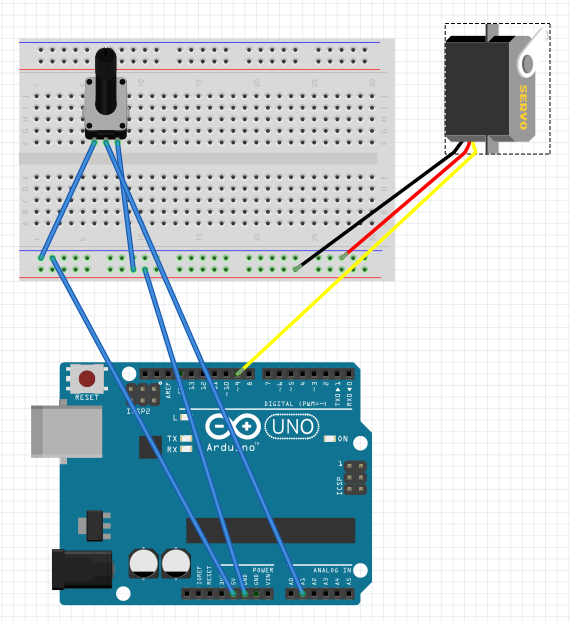
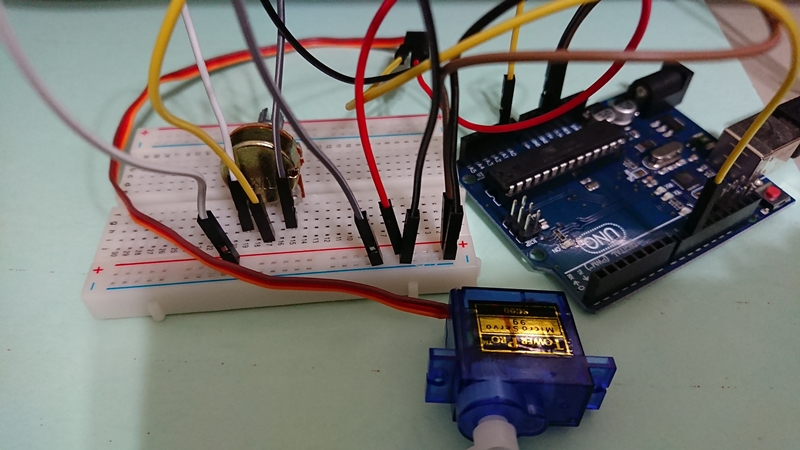
在這個電路圖中,我們把之前單元實習的內容整合在一起。可變電阻的兩端也是分別接到電源的正負極,而中間那個接腳則是接到A1輸入端。至於伺服馬達的部份,則是同上一個單元,接上電源之後,信號線連接到D9(有支援PWM的腳位)。實際連接後的電路如下所示:
有了這些連接線之後,再來就是簡單的程式設計了。在程式中,我們只需要一直去讀取A1的輸入內容,把A1的輸入內容從0~1023的範圍轉換成20~160(該伺服馬達的安全工作角度),然後再去驅動該馬達就可以了。程式如下:
https://gist.github.com/skynettw/9d0c29dd7caeffbfcd45e1979b79dec1
而以下就是執行結果的示範影片: