伺服馬達可以透過角度的方式讓馬達指定到固定的位置,對於控制一些機構的情況非常方便。第一個練習使用的是下面這顆伺服馬達:
大部份的伺服馬達都有三條線,分別是電源線的正負極(因為伺服馬達需要較大電流,所以也是要額外供電喔),以及一條決定要轉幾度的訊號線,而對於要控制它的角度的micro:bit來說,連接控制用的腳位需要有PWM能力,也就是以數位信號模擬類比信號的技術。micro:bit只有pin3, pin4, 以及pin10這三支接腳具備此能力,還記得micro:bit的接腳圖嗎?請參考以下的說明:
https://microbit-micropython.readthedocs.io/en/latest/pin.html?highlight=PWM
但是這3支接腳都和LED是共用的,所以為了使用這幾支接腳,要先把LED關閉才能。以下是測試的程式(假設把伺服馬達的信號號連接到pin3):
from microbit import *
display.off()
while True:
pin3.write_analog(60)
sleep(500)
pin3.write_analog(120)
sleep(500)執行上面這個程式,你有就可以看到伺服馬達以0.5秒為間隔,很快地在兩個不同的角度間轉動。
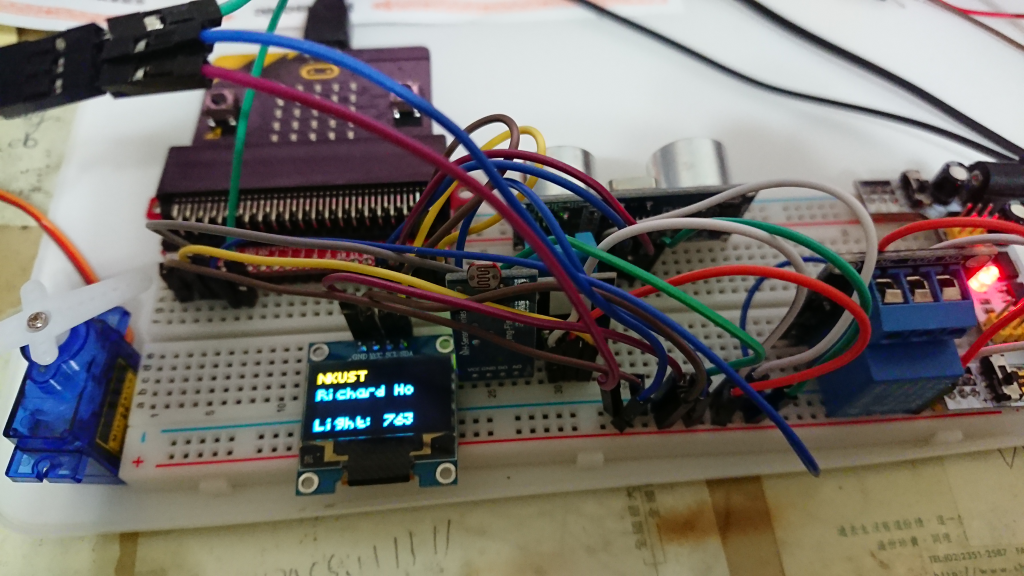
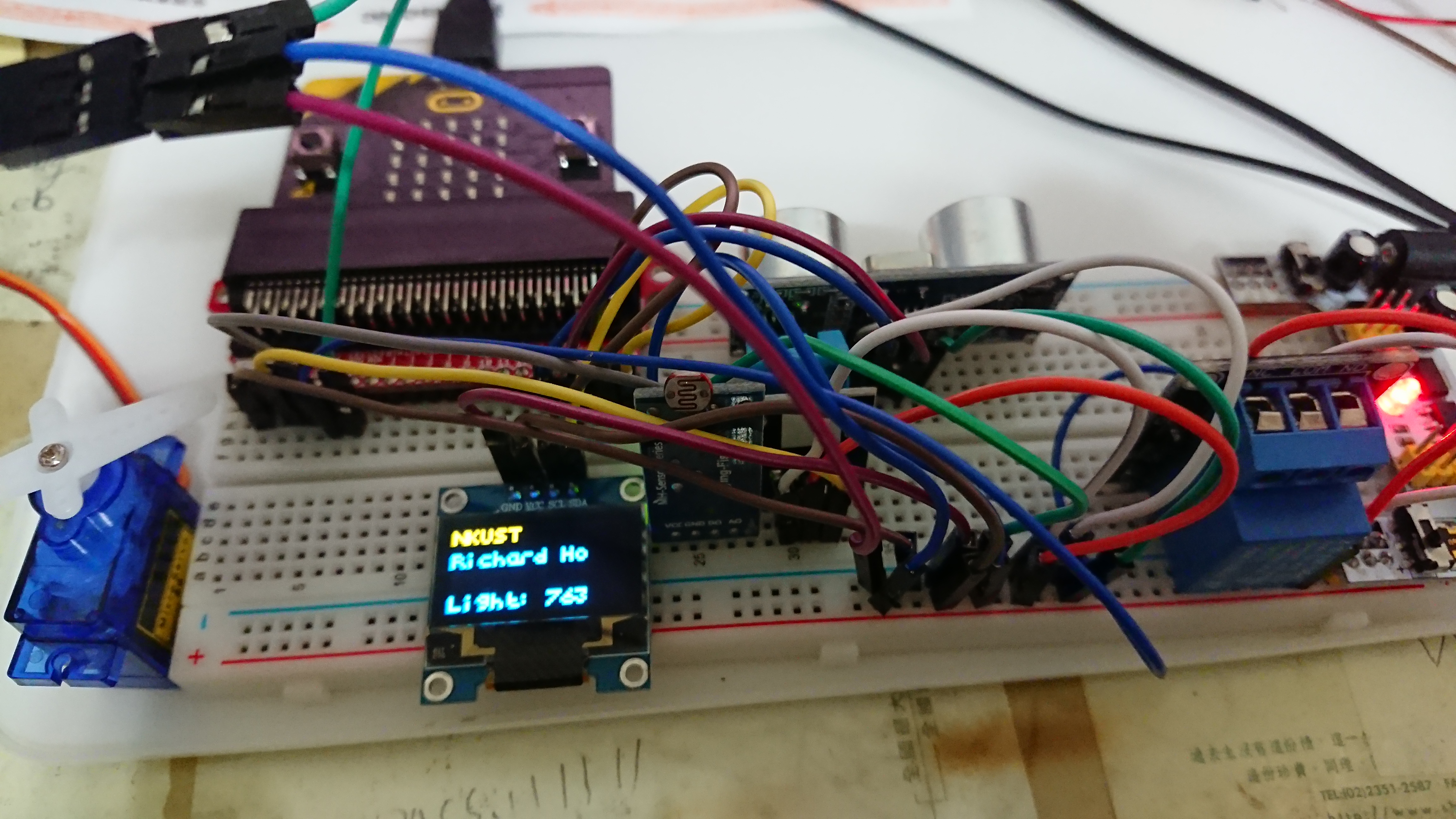
還記得前一個使用光感測器的單元嗎?結合光感測器,我們就可以利用不同的亮度來決定伺服馬達的轉動角度,這個方式就可以用來製作雷射光打靶遊戲喔。
from ssd1306 import initialize, clear_oled
from ssd1306_text import add_text
from microbit import *
display.off()
initialize()
clear_oled()
add_text(0, 0, 'NKUST')
add_text(0, 1, 'Richard Ho')
pin3.write_analog(120)
while True:
light = pin1.read_analog()
add_text(0, 3, 'Light:{:>4d}'.format(light))
if light < 300:
pin3.write_analog(60)
sleep(5000)
else:
pin3.write_analog(120)上面這個程式會把伺服馬達固定在某一個點上,當偵測到亮度小於300的時候,就會讓伺服馬達轉動到另外一個角度並停留5秒才再偵測是否需要回復到原有的角度。此外,為了讓我們可以隨時瞭解亮度的數值以方便調整程式,在程式中匯入了ssd1306,驅動OLED顯示器顯示出數值內容。